操作说明#
BIDL的使用流程分为如下几个步骤:
构建及网络训练阶段:
选择或构建一个数据集;
选择或构建一个网络结构;
修改配置config文件及训练脚本;
网络训练过程;
采用GPU进行验证和推理;
部署阶段:
采用Lyngor编译网络;
采用LynSDK实现网络推理。
训练部分#
操作流程#
训练部分主要操作流程如下图所示。
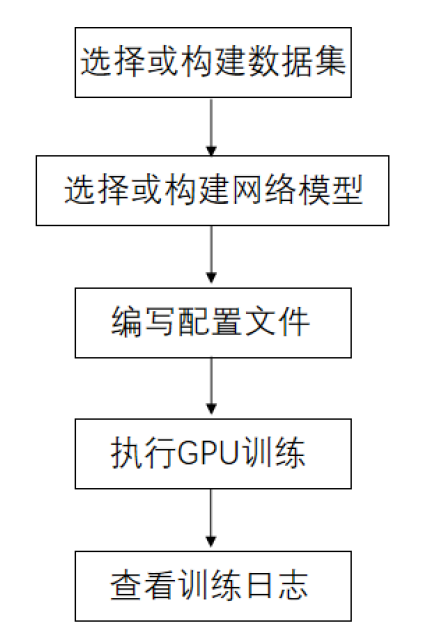
图 训练部分操作流程#
添加自定义数据集。
添加自定义模块。
添加新主干网络。
添加其他组件,包括新的颈部、头部、损失函数组件。
编写配置文件。
执行GPU训练。
查询训练结果。
选择或构建数据集#
选择已支持的数据集#
目前已添加到BIDL框架中的数据集均定义在 bidlcls/datasets/ 目录下,每个数据集对应一个文件,如 bidl_cifar10dvs.py 文件实现了将CIFAR10-DVS数据集添加到BIDL框架中使用的功能,即不同的文件将不同的数据集添加到了BIDL框架中,关于其中部分数据集构成的介绍参见 支持的数据集 。
根据在 bidlcls/datasets/ 目录下的文件中定义的数据集名称来选择使用不同的数据集,比如CIFAR10-DVS数据集在 bidl_cifar10dvs.py 文件定义的名称为Cifar10Dvs,可以将此名称写入需要使用此数据集的配置文件中,具体的方法可以参考 编写配置文件 中 编写配置文件 段落的数据(data)部分。
构建新的数据集#
根据数据集的构成,可以将数据集分为三类:帧序列、DVS事件数据、一维数据,帧序列数据一般是从视频片段中固定间隔抽帧来构成数据集,DVS事件数据通过将事件信息转换成帧序列的方式构成数据集。
各种形态的数据集的预处理方式会有区别,但在添加到BIDL框架中时,均需在 bidlcls/datasets/ 目录下定义一个相应的文件,且在文件中需要定义对应的类,具体步骤为:
编写继承自BasesDataset的新数据集类。
重载
load_annotations(self)方法,返回包含所有样本的列表。其中,每个样本都是一个 字典,字典中包含了必要的数据信息,例如img和gt_label等信息。
下面以CIFAR10DVS数据集的添加过程为例,介绍在BIDL框架中添加数据集的步骤。
在 bidlcls/datasets/ 目录下创建一个 bidl_cifar10dvs.py 文件,在该文件中创建一个Cifar10Dvs类以加载数据。
from bidlcls.datasets.base_dataset import BaseDataset class Cifar10Dvs(BaseDataset): CLASSES = ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck'] def load_annotations(self): print(f'loading {self.data_prefix}.pkl...') with open(self.data_prefix + '.pkl', 'rb') as f: dats, lbls, shape = pk.load(f) data_infos = [] for dat, lbl in zip(dats, lbls): info = { 'img': dat, 'pack': shape, # \``np.unpackbits`\` 'gt_label': np.array(lbl, dtype='int64') } data_infos.append(info) return data_infos
将定义好的新数据集类添加至 bidlcls/datasets/__init__.py 。
from .bidl_cifar10dvs import Cifar10Dvs #从编写好的数据集.py文件中导入数据集类 __all__ = [ ..., 'Cifar10Dvs', # 将新数据集类添加进来 ... ]
在 configs/ 目录下的配置文件中使用新的数据集,配置文件的详细使用方法参考 编写配置文件 的 编写配置文件 部分。
dataset_type = 'Cifar10Dvs' # 新数据集的名称 ... data = dict( samples_per_gpu=64, workers_per_gpu=2, train=dict( type=dataset_type, data_prefix='./data/cifar10dvs/train', # 新数据集的存放路径 pipeline=train_pipeline, test_mode=False ), val=dict( type=dataset_type, data_prefix='./data/cifar10dvs/test', pipeline=test_pipeline, test_mode=True ), test=dict( type=dataset_type, data_prefix='./data/cifar10dvs/test', pipeline=test_pipeline, test_mode=True ) )
选择或构建网络模型#
选择已有的网络模型#
BIDL框架中已有的网络模型均定义在bidlcls/models/backbones目录下,可通过映射部署在灵汐芯片上,其中 bidl_backbones_itout.py 和 bidl_resnetlif_itout.py 中定义的都是外循环版的网络模型,即时间步的循环在神经网络层外面,区别于时间步循环在网络层里面的网络模型。
可以根据数据集的特点,如数据集的规模或复杂程度等,选择不同的网络模型进行训练,例如对于Cifar10Dvs数据集,既可以选择SeqClif5Fc2CdItout网络模型,也可以选择ResNetLifItout网络模型,在后者为ResNet18时,其accuracy_top-1相比前者提升4%,后者所需的训练时间也长于前者。
针对特定的数据集选择的网络模型,需要将此网络模型的名称写入数据集相应的配置文件中,具体的方法可以参考 配置文件内容 章节中的编写配置文件内容的模型(model)部分。
构建新的网络模型#
典型的网络包括Sequential类网络和非Sequential类网络系列,分别位于 bidlcls/models/backbones 路径下的 sequential 文件夹和 residual 文件夹,下面举例介绍这两类典型骨干网络的构建方法。
典型的外循环网络模型名称的后缀都有 Itout ,是Iterate outside的缩写,用于表示时间步的循环在神经网络层外面。
Sequential类网络
下面以类VGG的SeqClif3Fc3DmItout网络模型的添加过程为例,介绍在BIDL框架中添加Sequential类外循环版网络模型的步骤。
在文件 bidlcls/models/backbones/sequential/bidl_backbones_itout.py 中添加时间循环在层外的SeqClif3Fc3DmItout网络模型。
在网络构建部分,此网络的三层卷积所用的Conv2d是conv2dLif不,而不是Conv2dLifIt层,因为前者只能处理单个时间步。各个时间步的结果需要聚合到一起,这里采用的模式为 mean ,即取均值的方式,还可以选择 sum 或 pick 模式。而Flatten层之前的数据维度为(B,C,H,W),因此Flatten层将CHW三个维度合在一起,然后输入后面的三层全连接网络,此三层全连接网络可以使用``nn.Sequential`` 结构,让代码更为简洁。
在网络 forward 部分,在特定网络层第一次运行的时候,需要显式调用reset方法给层中的部分状态变量赋予形状,这些网络层的详细介绍参见 神经元模型 。另外根据是在GPU上训练还是在灵汐芯片上推理,有两个分支:对于GPU训练分支,执行过程跟网络构建部分的顺序一致,三层卷积是通过循环的方式执行所有时间步的,然后将所有时间步的执行结果取均值,接着Flatten展平后输入全连接网络;而对于芯片推理分支,由于所有时间步的执行过程都是相同的,因此只需要执行一遍三层卷积,然后采用 ops.custom.tempAdd 的方式将所有时间步的结果加起来,接着Fatten展平后输入全连接网络,通过trace可以生成对应的op图,然后映射到芯片中通过LynSDK循环调用就可以实现时间步的循环,而对应于GPU训练的取均值,会通过LynSDK对tempAdd的结果取均值。
class SeqClif3Fc3DmItout(nn.Module):
"""For DVS-MNIST."""
def \__init\_\_(self, timestep=20, c0=2, h0=40, w0=40, nclass=10, cmode='spike', amode='mean', soma_params='all_share', noise=0, neuron='lif', neuron_config=None):
super(SeqClif3Fc3DmItout, self).\__init\_\_()
neuron=neuron.lower()
assert neuron in ['lif']
self.clif1 = Conv2dLif(c0, 32, 3, stride=1, padding=1, mode=cmode, soma_params=soma_params, noise=noise)
self.mp1 = nn.MaxPool2d(2, stride=2)
self.clif2 = Conv2dLif(32, 64, 3, stride=1, padding=1, mode=cmode, soma_params=soma_params, noise=noise)
self.mp2 = nn.MaxPool2d(2, stride=2)
self.clif3 = Conv2dLif(64, 128, 3, stride=1, padding=1, mode=cmode, soma_params=soma_params, noise=noise)
self.mp3 = nn.MaxPool2d(2, stride=2)
assert amode == 'mean'
self.flat = Flatten(1, -1)
self.head = nn.Sequential(
nn.Linear(h0 // 8 \* w0 // 8 \* 128, 512),
nn.ReLU(),
nn.Linear(512, 128),
nn.ReLU(),
nn.Linear(128, nclass)
)
self.tempAdd = None
self.timestep = timestep
self.ON_APU = globals.get_value('ON_APU')
self.FIT = globals.get_value('FIT')
def reset(self, xi):
self.tempAdd = pt.zeros_like(xi)
def forward(self, xis: pt.Tensor) -> pt.Tensor:
if self.ON_APU:
assert len(xis.shape) == 4
x0 = xis
self.clif1.reset(xis)
x1 = self.mp1(self.clif1(x0))
self.clif2.reset(x1)
x2 = self.mp2(self.clif2(x1))
self.clif3.reset(x2)
x3 = self.mp3(self.clif3(x2))
x4 = self.flat(x3)
x5 = self.head(x4)
x5 = x5.unsqueeze(2).unsqueeze(3)
self.reset(x5)
self.tempAdd = load_kernel(self.tempAdd, f'tempAdd')
self.tempAdd = self.tempAdd + x5 / self.timestep
output = self.tempAdd.clone()
save_kernel(self.tempAdd, f'tempAdd')
return output.squeeze(-1).squeeze(-1)
else:
t = xis.size(1)
xo_list = []
xo = 0
for i in range(t):
x0 = xis[:, i, ...]
if i == 0: self.clif1.reset(x0)
x1 = self.mp1(self.clif1(x0))
if i == 0: self.clif2.reset(x1)
x2 = self.mp2(self.clif2(x1))
if i == 0: self.clif3.reset(x2)
x3 = self.mp3(self.clif3(x2))
# xo_list.append(x3)
x4 = self.flat(x3)
x5 = self.head(x4)
xo = xo + x5 / self.timestep
return xo
在 bidlcls/models/backbones/__init__.py 中导入自定义的新主干网络。
from .sequential.bidl_backbones_itout import SeqClif3Fc3DmItout # 从编写好的新模块.py文件导入新模块类
...
__all__ = [
...,
'SeqClif3Fc3DmItout' # 将新模块添加进来
...
]
在各数据集对应文件夹下的配置文件中使用新的主干网络,配置文件的详细使用方法参考 编写配置文件 说明文档。
model = dict(
...
backbone=dict(
type='SeqClif3Fc3DmItout', # 新模块的名称
timestep=20,
c0=2,
h0=40,
w0=40,
nclass=10,
cmode='analog',
amode='mean',
noise=0
),
...
)
非Sequential类网络
下面以类ResNetLifItout网络模型的添加过程为例,介绍在BIDL框架中添加非Sequential类外循环版网络模型的步骤。
在文件 bidlcls/models/backbones/residual/bidl_resnetlif_itout.py 中添加时间循环在层外的ResNetLifItout网络模型。
在网络构建部分,参考经典的ResNet组建方式构建网络,池化层采用全局平均池化。
由于非Sequential类网络结构比较复杂,在特定网络层第一次运行的时候,不采用手动显式调用``reset`` 方法给层中的状态变量赋予形状的方式,而是通过注册自定义hook的方式来实现。
利用 nn.modules 自带的 register_forward_pre_hook 方法,在 _register_lyn_reset_hook 函数中遍历整个网络的所有层,在需要给状态变量赋予形状的层中注册自定义的 lyn_reset_hook ;然后在我们自定义的hook中通过 setattr() 方法给注册了此hook的层添加一个属性 lyn_cnt 并给它赋初值为 0 ,在一个样本 forward 的第一个时间步的时候会调用注册了自定义hook的层的 reset 方法,将其中的状态变量赋予形状并将此层的 lyn_cnt 加 1 ,而在其他时间步由于 lyn_cnt 非 0 ,则不需要调用此层的 reset 方法了。
而在一个样本 forward 执行完了所有的时间步之后,需要调用 self._reset_lyn_cnt 方法将``lyn_cnt`` 属性的值清零,以便于下一个样本对特定的层中的状态变量赋予形状。
在GPU上进行训练时,执行过程跟网络构建部分的顺序一致,全连接之前的层是通过循环的方式执行所有时间步的,然后将所有时间步的执行结果取均值,接着输入全连接网络。
# 参考经典的ResNet组建方式,定义BasicBlock类
class BasicBlock(nn.Module):
pass # 此处省略
# 参考经典的ResNet组建方式,定义BottleNeck类
class Bottleneck(nn.Module):
pass # 此处省略
# 定义ResNetLifItout类
class ResNetLifItout(nn.Module):
# ResNet深度与其对应的Block结构与数量
arch_settings = {
10: (BasicBlock, (1, 1, 1, 1)),
18: (BasicBlock, (2, 2, 2, 2)),
34: (BasicBlock, (3, 4, 6, 3)),
50: (Bottleneck, (3, 4, 6, 3)),
101: (Bottleneck, (3, 4, 23, 3)),
152: (Bottleneck, (3, 8, 36, 3))
}
def __init__(
self,
depth,
nclass,
low_resolut=False,
timestep=8,
input_channels=3,
stem_channels=64,
base_channels=64,
down_t=(4, 'max'),
zero_init_residual=False,
noise=1e-3,
cmode='spike',
amode='mean',
soma_params='all_share',
norm =None
):
super(ResNetLifItout, self).__init__()
# 其他特殊初始化流程
assert down_t[0] == 1
...
# 参考经典的ResNet实现方法,根据不同的Block结构来生成对应的层,此处不做具体说明
@staticmethod
def _make_layer(block, ci, co, blocks, stride, noise, mode='spike', soma_params='all_share', hidden_channels=None):
pass # 此处省略
# 将自定义的self.lyn_reset_hook注册到所有的Lif2d层中
def \_register_lyn_reset_hook(self):
for child in self.modules():
if isinstance(child, Lif2d): # Lif, Lif1d, Conv2dLif, FcLif...
assert hasattr(child, 'reset')
child.register_forward_pre_hook(self.lyn_reset_hook)
# 在此hook中,特定层的reset方法只在其属性lyn_cnt为0时调用一次
def lyn_reset_hook(m, xi: tuple):
assert isinstance(xi, tuple) and len(xi) == 1
xi = xi[0]
if not hasattr(m, 'lyn_cnt'):
setattr(m, 'lyn_cnt', 0)
if m.lyn_cnt == 0:
# print(m)
m.reset(xi)
m.lyn_cnt += 1
else:
m.lyn_cnt += 1
# 在一个样本的所有时间步执行完了之后调用此方法
def \_reset_lyn_cnt(self):
for child in self.modules():
if hasattr(child, 'lyn_cnt'):
child.lyn_cnt = 0
# 重写forward方法,输入为样本,返回值为ResNet最后一个全连接层的结果,此处不做具体说明
def forward(self, x):
x5s = []
for t in range(xis.size(1)):
xi = xis[:, t, ...]
x0 = self.lif(self.conv(xi))
x0 = self.pool(x0)
x1 = self.layer1(x0)
x2 = self.layer2(x1)
x3 = self.layer3(x2)
x4 = self.layer4(x3)
x5 = self.gap(x4)
x5s.append(x5)
xo = (sum(x5s) / len(x5s))[:, :, 0, 0]
xo = self.fc(xo)
self._reset_lyn_cnt()
return xo
在 bidlcls/models/backbones/__init__.py 中导入自定义的新主干网络。
from .residual.bidl_resnetlif_itout import ResNetLifItout # 从编写好的新模块.py文件导入新模
#块类
...
__all\_\_ = [
...,
'ResNetLifItout', # 将新模块添加进来
...
]
在数据集对应的目录下的配置文件中使用新的主干网络,配置文件的详细使用方法参考编写配置文件说明文档。
model = dict(
...
backbone = dict(
type = 'ResNetLifItout', # 新模块的名称
depth = 10, # 新模块的配置信息
nclass = 11,
other_args = xxx
),
...
)
编写配置文件#
所有配置文件都放在 application 对应的目录下,目录的基本结构为:
数据集所属的类别/数据集名称/数据集使用的模型名称/配置文件
配置文件命名规则#
配置文件名称分为三部分信息:
模型信息
训练信息
数据信息
属于不同部分的单词用短横线 - 连接。
模型信息
指骨干网络模型信息,例如:
clif3fc3dm_itout
clif3flif2dg_itout
clif5fc2cd_itout
resnetlif10_itout
itout 是iterate outside的缩写,用于表示时间步的循环在神经网络层外面,典型的外循环网络模型名称均有 itout 后缀。
训练信息
指训练策略的设置,包括:
Batchsize
GPU数量
学习率策略,可选
示例:
b16x4即单个GPU的上batchsize = 16,单个GPU的线程数为4;cos160e即采用余弦退火学习率策略,最大epoch为160。
数据信息
指采用的数据集,例如:
dvsmnist
cifar10dvs
jester
配置文件命名案例#
resnetlif18-b16x4-jester-cos160e.py
使用resnetlif18作为骨干网络,训练策略为单个GPU的上 batchsize = 16 ,单个GPU的线程数为4,数据集为jester数据集,采用余弦退火学习率策略,最大训练160个epoch。
配置文件内容#
配置文件内有4个基本组件类型,分别是:
模型(model)
数据(data)
训练策略(schedule)
运行设置(runtime)
以 applications/classification/dvs/dvs-mnist/clif3fc3dm/clif3fc3dm_itout-b16x1-dvsmnist.py 为例对上述四个部分分别进行说明。
模型(model)
模型参数model在配置文件中是一个Python字典,主要包括网络结构,损失函数等信息:
type:分类器名称,目前只支持ImageClassifier;
backbone:主干网络,可选项参考所支持模型说明文档;
neck:颈网络类型,目前暂不使用;
head:头网络模型;
loss:损失函数类型,支持CrossEntropyLoss、LabelSmoothLoss等。
model = dict(
type='ImageClassifier',
backbone=dict(
type='SeqClif3Fc3DmItout', timestep=20, c0=2, h0=40, w0=40, nclass=10,
cmode='analog', amode='mean', noise=0, soma_params='all_share',
neuron='lif', # neuron mode: 'lif' or 'lifplus'
neuron_config=None # neron configs:
# 1.'lif': neuron_config=None;
# 2.'lifplus': neuron_config=[input_accum, rev_volt, fire_refrac,
# spike_init, trig_current, memb_decay], eg.[1,False,0,0,0,0]
),
neck=None,
head=dict(
type='ClsHead',
loss=dict(type='LabelSmoothLoss', label_smooth_val=0.1, loss_weight=1.0),
topk=(1, 5),
cal_acc=True
)
)
备注
目前BIDL框架的模型主要集成在backbone当中,neck暂不使用,head仅指定分类头网络的损失函数和评估指标。
数据(data)
模型参数model在配置文件中是一个Python字典,主要包括构造数据集加载器(dataloader)配置信息:
samples_per_gpu:构建dataloader时,每个GPU的batchsize;
workers_per_gpu:构建dataloader时,每个GPU的线程数;
train | val | test:构造数据集。
type:数据集类型,支持ImageNet、Cifar、DVS-Gesture等数据集
data_prefix:数据集根目录。
pipeline:数据处理流水线。
dataset_type = 'DvsMnist' # 数据集名称
# 训练数据处理流水线
train_pipeline = [
dict(type='RandomCropVideo', size=40, padding=4), # 带时间轴样本的随机裁剪
dict(type='ToTensorType', keys=['img'], dtype='float32'), # image 转为torch.Tensor
dict(type='ToTensor', keys=['gt_label']), # gt_label 转为 torch.Tensor
dict(type='Collect', keys=['img', 'gt_label']) # 决定数据中哪些键应传递给检测器的流程,train时传递img, gt_label
]
# 测试数据处理流水线
test_pipeline = [
dict(type='ToTensorType', keys=['img'], dtype='float32'), # image 转为torch.Tensor
dict(type='Collect', keys=['img']) # test 时不需要传递 gt_label
]
data = dict(
samples_per_gpu=16, # 单个 GPU 的 batchsize
workers_per_gpu=2, # 单个 GPU 的线程数
train=dict(
type=dataset_type, # 数据集名称
data_prefix='data/dvsmnist/train/', # 数据集目录文件
pipeline=train_pipeline # 数据集需要经过的数据处理流水线
),
val=dict(
type=dataset_type, # 数据集名称
data_prefix='data/dvsmnist/val/', # 数据集目录文件
pipeline=test_pipeline, # 数据集需要经过的数据处理流水线
test_mode=True
),
test=dict(
type=dataset_type,
data_prefix='data/dvsmnist/test/',
pipeline=test_pipeline,
test_mode=True
)
)
数据处理流水线(pipeline),定义了所有准备数据字典的步骤,由一系列操作组成,每个操作都将以一个字典作为输入,并输出一个字典。数据流水线中的操作方法都定义在 bidlcls/datasets/pipeline 文件夹下。
数据流水线中的操作可以分为以下三个类别:
数据加载:从文件中加载图像,定义在 pipelines/bidl_loading.py 中,例如
LoadSpikesInHdf5(),从Hdf5类型的文件中读取dvs数据集。预处理:对图像进行旋转和裁剪等操作,定义在 pipelines/bidl_formating.py 和 pipelines/bidl_transform.py 中,例如
RandomCropVideo(),对图像进行随机裁剪。格式化:将图像或标签转换至指定的数据类型,定义在 pipelines/bidl_formating.py 中,例如
ToTensorType(),将处理好的图像转换为Tensor类型。
训练策略(schedule)
主要包含优化器设置、optimizer hook设置、学习率策略和runnner设置。
optimizer:优化器设置信息,支持pytorch中所有的优化器,同时它们的参数设置与pytorch中的优化器参数一致,可参考相关Pytorch文档。
optimizer_config:optimizer hook的配置文件,如设置梯度限制。
lr_config:学习率策略,支持CosineAnnealing、Step等。
optimizer = dict(
type='SGD', # 优化器类型
lr=0.1, # 优化器的学习率
momentum=0.9, # 动量
weight_decay=0.0001 # 权重衰减系数
)
optimizer_config = dict(grad_clip=None) # 大多数方法不使用梯度限制(grad_clip)
lr_config = dict(policy='CosineAnnealing', min_lr=0) # 学习率调整策略
runner = dict(type='EpochBasedRunner', max_epochs=40) # 使用的runner类别
运行设置(runtime)
主要包含保存权重策略,日志配置,训练参数,断点权重路径和工作目录等信息:
checkpoint_config = dict(interval=1) # checkpoint 保存的间隔为1,单位根据runner不同变动,可以为epoch或者iter
log_config = dict(interval=50, # 打印日志的间隔
hooks=[dict(type='TextLoggerHook')]) # 用于记录训练过程的文本记录器(logger)
dist_params = dict(backend='nccl') # 用于设置分布式训练的参数,端口也同样可以被设置
log_level = 'INFO' # 日志的输出级别
load_from = None # 从给定路径恢复检查点(checkpoints),训练模式将从检查点保存的轮次开始恢复训练
resume_from = None # 从给定路径恢复检查点(checkpoints),训练模式将从检查点保存的轮次开始恢复训练
执行GPU训练#
训练入口为 tools/train.py ,同一目录下的 dist_train.sh 提供了单机多卡训练。
前提条件:已编写配置文件,包含训练相关的模型,数据,训练策略等信息。具体说明参见 编写配置文件。
例如,使用 resnetlif10-b16x1-dvsmnist.py 配置文件。
在 tools/ 目录下执行以下命令,开始训练。
python train.py --config resnetlif10-b16x1-dvsmnist
查看训练日志#
训练所保存的日志和检查点存档在 work_dirs/resnetlif10-b16x1-dvsmnist/ 保存,保存文件的目录可参考 模型训练 。
部署部分#
部署部分主要包括了先在GPU上进行评估、以及为了适用于Lyngor编译的骨干网定义而进行的对骨干网的替换方法,最后在APU上进行评估/部署。
使用GPU进行评估#
评估入口: tools/test.py
前提条件:已编写配置文件,包含训练相关的模型,数据,训练策略等信息。具体说明参见 编写配置文件 。
设置 use_lyngor 标识设置为0,即使用GPU进行编译。
--use_lyngor 0 # 是否使用Lyngor进行编译,设置为0表示用GPU
分别设置 --config 和 --checkpoint ,选择目录下已定义的配置文件和对应的checkpoint文件。
比如,用资源包 weight_files 中对应路径下的 latest.pth 权重文件,用于在Jester验证集上评估模型性能:
在 tools/ 目录下执行如下命令:
python test.py --config resnetlif18-itout-b20x4-16-jester --checkpoint latest.pth --use_lyngor 0 --use_legacy 0
评估的推理速度和正确率都会显示在终端中。
使用灵汐类脑计算设备进行编译和部署#
注:此部分需将软件包部署于灵汐类脑计算设备(服务器或嵌入式盒子),且无需GPU支持。
使用灵汐类脑计算设备进行编译和部署,需要在执行命令后加上参数 --use_lyngor 1 。
使用Lyngor进行编译#
使用Lyngor进行编译,还需要执行命令后加上参数 --use_legacy 0 ,即不加载历史编译生成物,而是直接编译。
前提条件:使用Lyngor编译,需要先执行 lynadapter 目录下的 build_run_lif.sh 脚本,在Lyngor中注册自定义算子。
if args.use_lyngor == 1:
globals.set_value('ON_APU', True)
globals.set_value('FIT', True)
if 'soma_params' in cfg.model["backbone"] and cfg.model["backbone"]['soma_params'] == 'channel_share':
globals.set_value('FIT', False)
else:
globals.set_value('ON_APU', False)
cfg.data.samples_per_gpu = 1
上述代码中,如果判断为在APU上编译,就会将模型的backbone的两个配置参数 on_apu 和 fit 设置为 True ,即每个lif类实例会生成一个UUID且会将LIF神经元的部分计算用自定义算子的方式实现。此外,还将数据集的 batchsize 设置为 1 ,输入类型设置为 uint8 以适配底层。
dataset = build_dataset(cfg.data.test)
t, c, h, w = dataset.__getitem__(0)['img'].shape
in_size = [((1, c, h, w),)]
input_type=”uint8”
from lynadapter.lyn_compile import model_compile
model_compile(model.backbone.eval(),_base\_,in_size,args.v,args.b,input_type=input_type)
上述代码中,先从数据集中获取模型输入大小,即t,c,h,w值。之后通过lyn_compilee中的
model_compile 方法执行Lyngor编译, in_size 为四维大小,且 batchsize 为 1 。
在 model_compile 方法中主要调用 run_custom_op_in_model_by_lyn() 函数进行编译操作,该函数调用Lyngor相关接口函数加载模型和执行编译,具体的实现代码如下:
def run_custom_op_in_model_by_lyn(in_size, model, dict_data,out_path,target="apu"):
dict_inshape = {}
dict_inshape.update({'data':in_size[0]})
# \*1.DLmodel load
lyn_model = lyn.DLModel()
model_type = 'Pytorch'
lyn_model.load(model, model_type, inputs_dict = dict_inshape)
# \*2.DLmodel build
# lyn_module = lyn.Builder(target=target, is_map=False, cpu_arch='x86', cc="g++")
lyn_module = lyn.Builder(target=target, is_map=True)
opt_level = 3
module_path=lyn_module.build(lyn_model.mod, lyn_model.params, opt_level, out_path=out_path)
假设配置文件名为 clif3fc3dm_itout-b16x1-dvsmnis.py ,则会在配置文件同目录下生成名称为 Clif3fc3dm_itoutDm 的文件夹,而相应的编译生成物会存放在该文件夹下,具体如下:
.
├── Net_0
│ ├── apu_0
│ │ ├── apu_lib.bin
│ │ ├── apu_x
│ │ │ ├── apu.json
│ │ │ ├── cmd.bin
│ │ │ ├── core.bin
│ │ │ ├── dat.bin
│ │ │ ├── ddr_config.bin
│ │ │ ├── ddr.dat
│ │ │ ├── ddr_lut.bin
│ │ │ ├── lookup_ddr_addr.bin
│ │ │ ├── lyn\__2023-12-11-16-28-59-076024.mdl
│ │ │ ├── pi_ddr_config.bin
│ │ │ ├── snn.json
│ │ │ └── super_cmd.bin
│ │ ├── case0
│ │ │ └── net0
│ │ │ └── chip0
│ │ │ └── tv_mem
│ │ │ └── data
│ │ │ ├── input.dat
│ │ │ ├── output.dat
│ │ │ └── output_ddr.dat
│ │ ├── data
│ │ │ └── 100
│ │ │ ├── dat.bin
│ │ │ ├── input.dat
│ │ │ ├── output.dat
│ │ │ ├── output_ddr_2.dat
│ │ │ └── output_ddr.dat
│ │ ├── fpga_config.log
│ │ └── prim_graph.bin
│ └── top_graph.json
└── net_params.json
跳过Lyngor编译#
如果已有相关模型的编译生成物,则可以跳过重新编译的步骤,直接加载历史编译生成物,具体的方法是执行命令时加上 --use_legacy 1 。
SDK推理#
得到模型的编译生成物后就可以进行SDK推理。首先根据芯片ID、编译生成物的路径以及时间拍数实例化 ApuRun 类。
arun = ApuRun(chip_id, model_path,t)
实例化的过程中调用 self._sdk_initialize() 函数进行模型的初始化。
def _sdk_initialize(self):
ret = 0
self.context, ret = sdk.lyn_create_context(self.apu_device)
error_check(ret != 0, "lyn_create_context")
ret = sdk.lyn_set_current_context(self.context)
error_check(ret != 0, "lyn_set_current_context")
ret = sdk.lyn_register_error_handler(error_check_handler)
error_check(ret != 0, "lyn_register_error_handler")
self.apu_stream_s, ret = sdk.lyn_create_stream()
error_check(ret != 0, "lyn_create_stream")
self.apu_stream_r, ret = sdk.lyn_create_stream()
error_check(ret != 0, "lyn_create_stream")
self.mem_reset_event, ret = sdk.lyn_create_event()
error_check(ret != 0, "lyn_create_event")
之后调用 self._model_parse() 函数进行模型参数解析以及内存空间申请。
def _model_parse(self):
ret = 0
self.modelDict = {}
model_desc, ret = sdk.lyn_model_get_desc(self.apu_model)
error_check(ret != 0, "lyn_model_get_desc")
self.modelDict['batchsize'] = model_desc.inputTensorAttrArray[0].batchSize
self.modelDict['inputnum'] = len(model_desc.inputTensorAttrArray)
inputshapeList = []
for i in range(self.modelDict['inputnum']):
inputDims = len(model_desc.inputTensorAttrArray[i].dims)
inputShape = []
for j in range(inputDims):
inputShape.append(model_desc.inputTensorAttrArray[i].dims[j])
inputshapeList.append(inputShape)
self.modelDict['inputshape'] = inputshapeList
self.modelDict['inputdatalen'] = model_desc.inputDataLen
self.modelDict['inputdatatype'] = model_desc.inputTensorAttrArray[0].dtype
self.modelDict['outputnum'] = len(model_desc.outputTensorAttrArray)
outputshapeList = []
for i in range(self.modelDict['outputnum']):
outputDims = len(model_desc.outputTensorAttrArray[i].dims)
outputShape = []
for j in range(outputDims):
outputShape.append(model_desc.outputTensorAttrArray[i].dims[j])
outputshapeList.append(outputShape)
self.modelDict['outputshape'] = outputshapeList
self.modelDict['outputdatalen'] = model_desc.outputDataLen
self.modelDict['outputdatatype'] = model_desc.outputTensorAttrArray[0].dtype
# print(self.modelDict)
print('######## model informations ########')
for key,value in self.modelDict.items():
print('{}: {}'.format(key, value))
print('####################################')
for i in range(self.input_list_len):
apuinbuf, ret = sdk.lyn_malloc(self.modelDict['inputdatalen'] * self.modelDict['batchsize'] * self.time_steps)
self.apuInPool.put(apuinbuf)
setattr(self, 'apuInbuf{}'.format(i), apuinbuf)
apuoutbuf, ret = sdk.lyn_malloc(self.modelDict['outputdatalen'] * Self.modelDict['batchsize'] * self.time_steps)
self.apuOutPool.put(apuoutbuf)
setattr(self, 'apuOutbuf{}'.format(i), apuoutbuf)
self.hostOutbuf = sdk.c_malloc(self.modelDict['outputdatalen'] * self.modelDict['batchsize'] * self.time_steps)
for i in range(self.input_list_len):
self.input_list[i] = np.zeros(self.modelDict['inputdatalen'] * self.modelDict['batchsize'] * self.time_steps/dtype_dict[self.modelDict['inputdatatype']][1], dtype = dtype_dict[self.modelDict['inputdatatype']][0])
self.input_ptr_list[i] = sdk.lyn_numpy_to_ptr(self.input_list[i])
self.dev_ptr, ret = sdk.lyn_malloc(self.modelDict['inputdatalen'] * self.modelDict['batchsize'])
self.dev_out_ptr, ret = sdk.lyn_malloc(self.modelDict['outputdatalen'] * self.modelDict['batchsize'])
self.host_out_ptr = sdk.c_malloc(self.modelDict['outputdatalen'] * self.modelDict['batchsize'])
之后就可以在测试集上进行推理。
for epoch in range(num_epochs):
for i, data in enumerate(data_loader):
data_img = data["img"]
arun.run(data_img.numpy())
prog_bar.update()
output = arun.get_output()
代码中,对每个batch的测试数据进行遍历。data_img中存储1个测试样本(已设置 batchsize 为 1 )的数据。之后再调用 arun 类的 run 方法在灵汐芯片中运行该数据。 run 函数如下:
def run(self, img):
assert isinstance(img, np.ndarray)
currentInbuf = self.apuInPool.get(block=True)
currentOutbuf = self.apuOutPool.get(block=True)
ret = 0
sdk.lyn_set_current_context(self.context)
img = img.astype(dtype_dict[self.modelDict['inputdatatype']][0])
i_id = self.run_times % self.input_list_len
self.input_list[i_id][:] = img.flatten()
# img_ptr, _ = sdk.lyn_numpy_contiguous_to_ptr(self.input_list[i_id])
ret = sdk.lyn_memcpy_async(self.apu_stream_s, currentInbuf,
self.input_ptr_list[i_id], self.modelDict['inputdatalen'] * self.modelDict['batchsize'] * self.time_steps, C2S)
error_check(ret != 0, "lyn_memcpy_async")
apuinbuf = currentInbuf
apuoutbuf = currentOutbuf
for step in range(self.time_steps):
if step == 0:
if self.run_times > 0:
sdk.lyn_stream_wait_event(self.apu_stream_s, self.mem_reset_event)
ret = sdk.lyn_model_reset_async(self.apu_stream_s, self.apu_model)
error_check(ret != 0, "lyn_model_reset_async")
# ret = sdk.lyn_execute_model_async(self.apu_stream_s, self.apu_model, apuinbuf, apuoutbuf, self.modelDict['batchsize'])
# error_check(ret!=0, "lyn_execute_model_async")
ret = sdk.lyn_model_send_input_async(self.apu_stream_s, self.apu_model, apuinbuf, apuoutbuf, self.modelDict['batchsize'])
error_check(ret != 0, "lyn_model_send_input_async")
ret = sdk.lyn_model_recv_output_async(self.apu_stream_r, self.apu_model)
error_check(ret != 0, "lyn_model_recv_output_async")
apuinbuf = sdk.lyn_addr_seek(apuinbuf, self.modelDict['inputdatalen'] * self.modelDict['batchsize'])
apuoutbuf = sdk.lyn_addr_seek(apuoutbuf, self.modelDict['outputdatalen'] * self.modelDict['batchsize'])
if step == self.time_steps - 1:
ret = sdk.lyn_record_event(self.apu_stream_r, self.mem_reset_event)
# sdk.lyn_memcpy_async(self.apu_stream_r,self.hostOutbuf,self.apuOutbuf,self.modelDict['outputdatalen']*self.modelDict['batchsize']*self.time_steps,S2C)
ret = sdk.lyn_stream_add_callback(self.apu_stream_r, get_result_callback, [self, currentInbuf, currentOutbuf])
self.run_times += 1
上述推理过程中,先将多拍的数据拷贝到设备侧,再对时间拍进行循环,每一拍推理一次,并且如果是第一帧的话调用SDK接口 sdk.lyn_model_reset_async 对状态变量进行复位。所有拍推理结束调用
sdk.lyn_stream_add_callback 接口将推理结果传回主机侧。具体接口说明参见《LynSDK开发指南(C&C++/Python)》。
以dvs-mnist数据为例,最后推理结果显示:
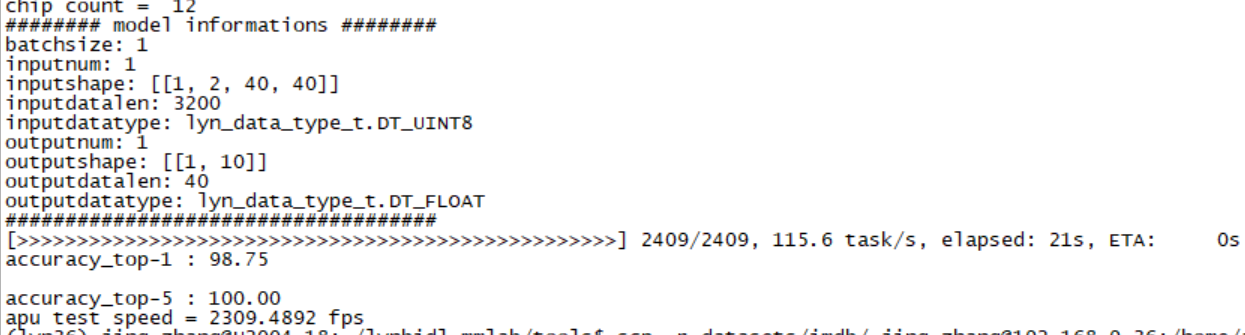
图 dvs-mnist数据推理结果#
部署单机多卡#
单机多卡设计方案#
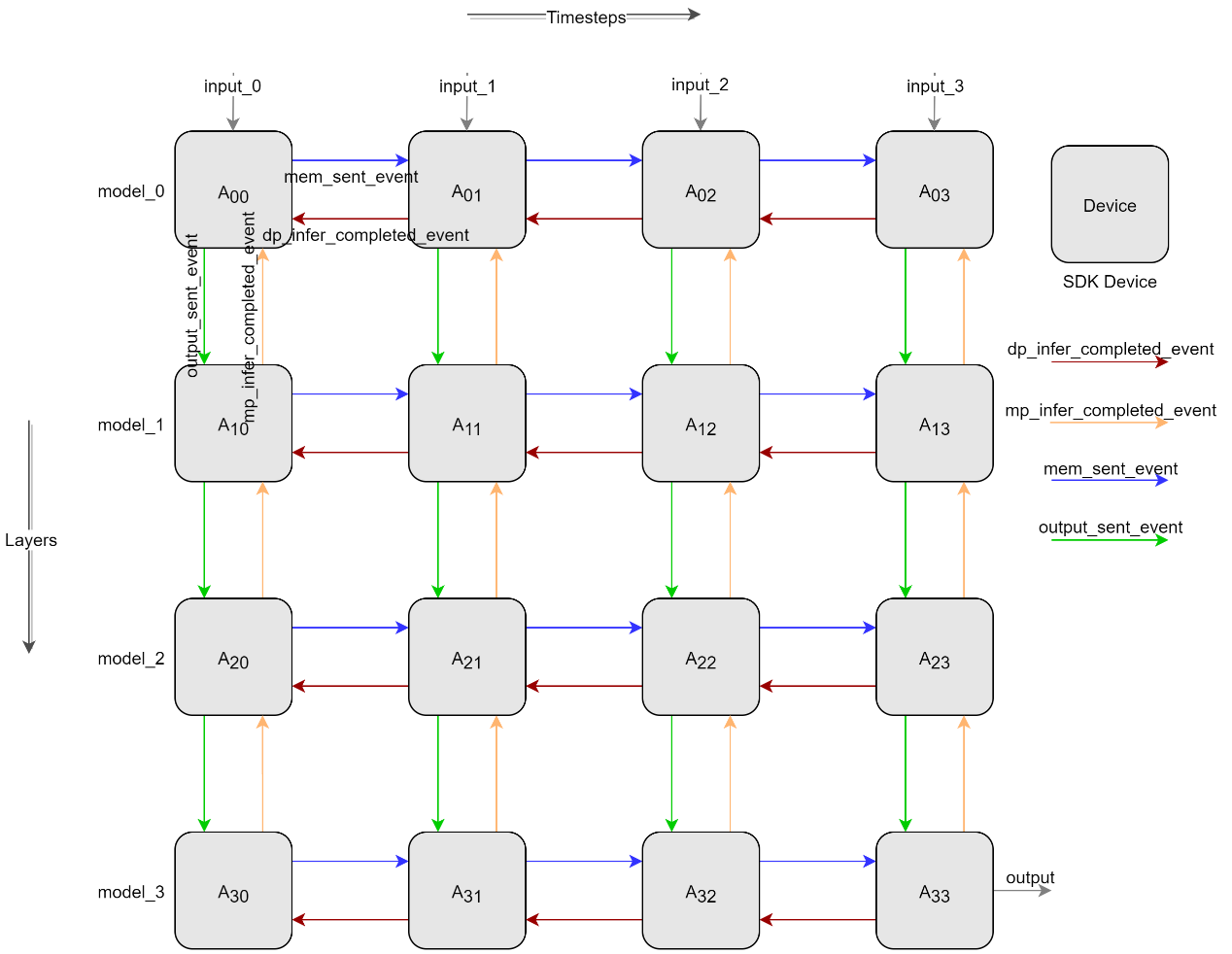
图 流水并行设计图#
如 图 流水并行设计图 所示,横向表示时间切分,纵向表示模型切分,通过时空切分来实现多卡流水并行推理。Device之间通过 图 流水并行设计图 所示箭头来进行数据传递和同步。横向A00推理完成后先确认接收到A01推理完成的event(如红色箭头)后,A00发送膜电位给A01并发送膜电位发送完成的event(如红色箭头),A01确认收到膜电位发送完成的event后开始推理。纵向A00推理完成后先确认接收到A10推理完成的event(如橙色箭头)后,A00发送输出给A10并发送输出发送完成的event(如绿色箭头),A10确认收到输出发送完成的event后使用A00的输出作为输入开始推理。
单机多卡测试结果#
如单样本推理时间占比远大于其他开销测试,帧率与芯片数量呈线性增长。测试结果如下图表所示。

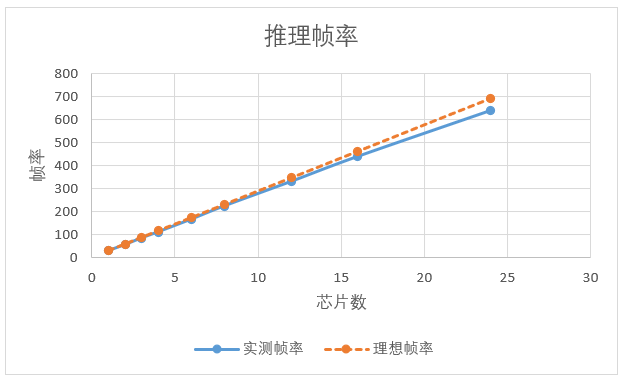
如芯片数量相同,时空切分后的推理帧率要优于只做时间拍切分,测试结果如下图表所示。

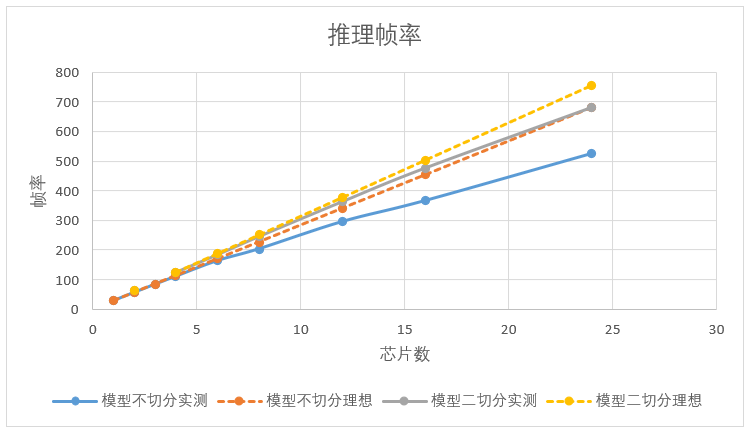
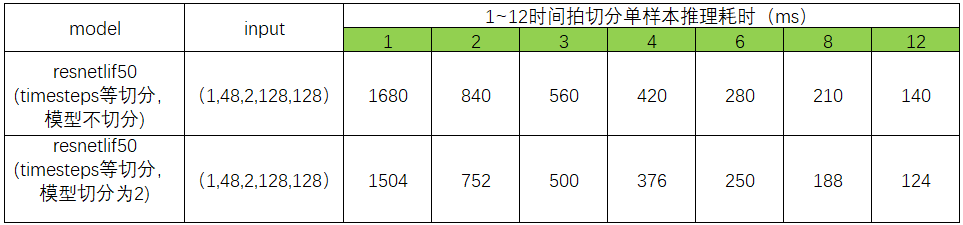
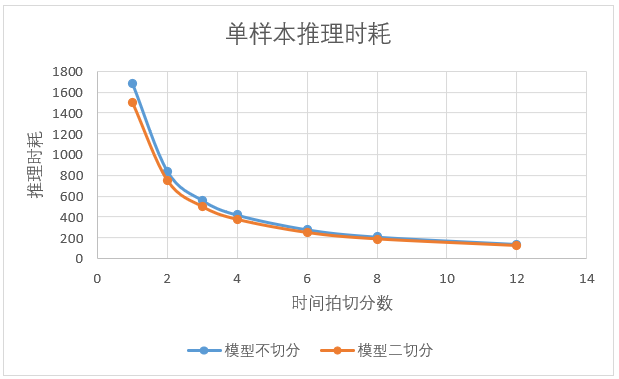
相同输入大小情况下,模型切分后推理耗时要小与单模型推理。如上图,模型二切分2颗芯片推理速度要大于模型不切分1颗芯片时推理速度的2倍。
源代码及操作#
代码路径: ./tools/
apuinfer_mutidevice.py:单机多卡推理测试脚本;
lyn_sdk_model_multidevice.py:时空切分流水并行SDK封装类文件;
complie_for_mp.py:模型切分编译脚本;
Resentlif50模型切分编译
配置文件:resnetlif50-itout-b8x1-cifar10dvs_mp.py
models_compile_inputshape = [[1, 2, 128, 128], [1, 512, 16, 16]] # dim 0 represents the number of model slice; dim 1 represent the input shape of model slice;
model_0 = dict(
type='ImageClassifier',
backbone=dict(
type='ResNetLifItout_MP',
timestep=10,
depth=50, nclass=10,
down_t=[1, 'avg'],
input_channels=2,
noise=1e-5,
soma_params='channel_share',
cmode='spike',
split=[0, 6] # layers included of model_0
),
neck=None,
head=dict(
type='ClsHead',
# loss=dict(type='CrossEntropyLoss', loss_weight=1.0),
loss=dict(type='LabelSmoothLoss', label_smooth_val=0.1, loss_weight=1.0),
topk=(1, 5),
cal_acc=True
)
)
model_1 = dict(
type='ImageClassifier',
backbone=dict(
type='ResNetLifItout_MP',
timestep=10,
depth=50, nclass=10,
down_t=[1, 'avg'],
input_channels=2,
noise=1e-5,
soma_params='channel_share',
cmode='spike',
split=[6, 16] # layers included of model_1
),
neck=None,
head=dict(
type='ClsHead',
# loss=dict(type='CrossEntropyLoss', loss_weight=1.0),
loss=dict(type='LabelSmoothLoss', label_smooth_val=0.1, loss_weight=1.0),
topk=(1, 5),
cal_acc=True
)
)
Resnetlif50单机多卡推理
配置文件:
resnetlif50-itout-b8x1-cifar10dvs.py
# dim 0 represents the number of timesteps slices;
# dim 1 represents the number of model segments;
# value represents the device id;
# eg. lynxi_devices = [[0,1],[2,3],[4,5]], timesteps slices are 3, model segments are 2, device ids are 0,1,2,3,4,5.
# lynxi_devices = [[0],[1],[2],[3],[4],[5],[6],[7],[8],[9],[10],[11],[12],[13],[14],[15],[16],[17],[18],[19],[20],[21],[22],[23]]
lynxi_devices = [[0],[1]]
resnetlif50-itout-b8x1-cifar10dvs_mp.py
# dim 0 represents the number of timesteps slices;
# dim 1 represents the number of model segments;
# value represents the device id;
# eg. lynxi_devices = [[0,1],[2,3],[4,5]], timesteps slices are 3, model segments are 2, device ids are 0,1,2,3,4,5.
# lynxi_devices = [[0,1],[2,3],[4,5],[6,7],[8,9],[10,11],[12,13],[14,15],[16,17],[18,19],[20,21],[22,23]]
lynxi_devices = [[0,1]]
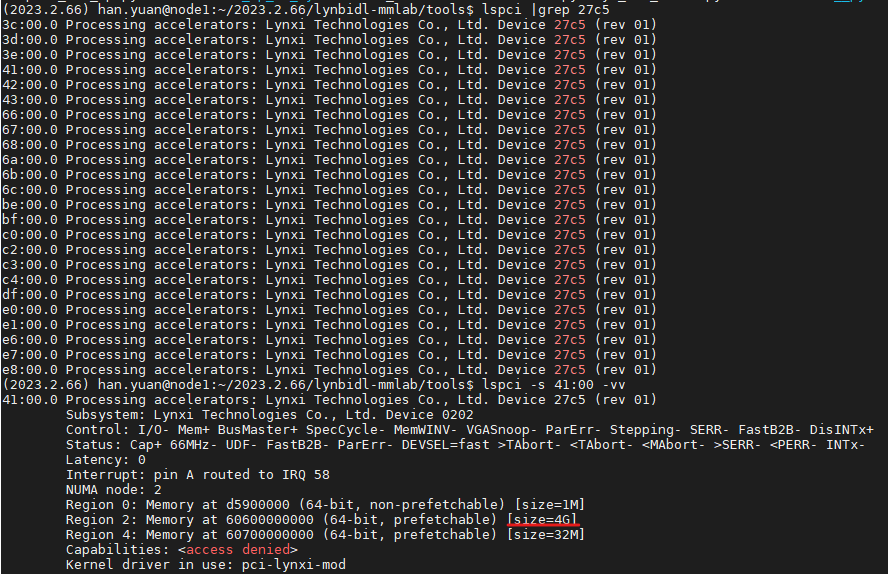
测试环境
SDK 1.11.0版本
apuinfer_mutidevice.py中默认lyn_sdk_model_multidevice.via_p2p = False,表示不使用P2P功能。 如设置为True时,需要设备支持P2P功能。如下图红色划线部分(size=4G)表示设备已支持P2P功能。