Tiger1数据集目标跟踪#
数据及预处理
Tiger1数据集由一段分辨率为640×480的视频构成,该视频共354帧,每一帧均有人工标注的矩形框(x, y, w, h)作为待跟踪目标的groundtruth,其中x, y为矩形框的左上角坐标,w,h分别为矩形框的宽和高。视频中,有光照度变化,待跟踪目标存在被阻挡情况,存在目标发生形变情况,存在目标动作模糊情况,存在目标在平面内及平面外旋转的情况。
为节省图形内存,我们将每一帧彩色图像先转换为灰度图像,然后下采样至30×56分辨率。
网络模型
此任务中用到的网络模型是连续吸引子网络(CANN),是一种受神经科学启发的模型。如下图所示,x为二维平面上的坐标位置,\(V(x,\ t)\)为位置x和时间t的神经元的膜电位,
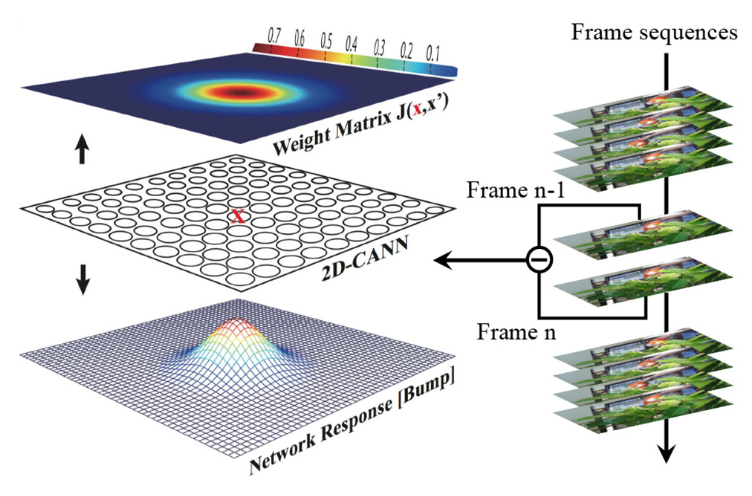
图 CANN原始动态模型示意图#
基于CANN的对象跟踪实例
r(x,t)为该神经元的发射率。有理由认为,\(r(x,\ t)\)随着\(V(x,\ t)\)的增加而增加,但在存在全局抑制的情况下达到饱和。满足这一特性的模型可表示为:
其中k是一个小的正超参数,控制全局抑制的强度。
在CANN模型中,\(V(x,\ t)\)是由外部刺激和来自其他神经元的递归输入以及其自身的松弛度决定的。用\(V_{ext}(x,t)\)表示在时间t对神经元x的外部刺激,则该模型可表示为:
其中\(\tau\)是一个时间常数,通常在1毫秒的量级,\(\beta\)决定了循环输入和外部刺激之间的比例。\(J\left( x,x^{'} \right)\)是位于\(x^{'}\)位置的神经元与位于\(x\)位置的神经元之间的相互作用(突触权重)。 \(J\left( x,x^{'} \right)\)计算如下:
其中\(J_{0}\)是一个常数,\(a\)表示高斯交互作用范围, \(|x - x^{'}|\)表示神经元\(x\)和\(x^{'}\)\(\frac{J_{0}}{2\pi a^{2}}\)是最大的交互范围。上述公式对具有平移不变性的突触模式(凸起形状)编码,产生类似的由神经元的高放电率表示的响应凸起模式。响应凸起可以预示对象的位置。此外,神经元距离是圆形的,这意味着最顶部和底部的神经元以及最左侧和最右侧的神经元作为相邻神经元连接。这种对称性保证了边界处的凸起稳定性。
如 图 CANN原始动态模型示意图 所示,来自视频的每两个相邻帧的差分信号被注入网络作为外部刺激 \(V_{ext}(x,t)\),每个神经元接收2D差分帧中相应像素的强度。CANN能够平滑地跟踪对象,因为连续的神经动力学导致响应凸起的移动轨迹是平滑的。轨迹有如下特性:
在没有外部刺激的情况下,网络仍然可以通过循环注入保持固定的响应凸起;
在存在物体的情况下,尤其是连续移动的物体,网络可以根据移动目标平滑地改变其响应凸起。 上述视频展示了一个基于CANN的对象跟踪实例,红色边界框是物体位置的金标准,响应凹凸表示的黄色边界框反映了预测的位置。
由于远程连接通常对神经元膜电位和发射率的影响很小,同时为了更方便在数字电路实现,公式(2)可在没太多精度损失的情况下表示为:
其中\(x^{'} \in CF(x,\ R)\)表示每个神经元x只与以x为中心的R×R矩形区域内的邻近神经元有局部联系。
由于数字电路不能直接支持公式(1)和公式(2)中的连续微分动力学,可采用迭代状态更新方法,将连续动力学离散为等效的差分方程。通过设置τ=1和∂t=1,CANN的连续状态更新可以被修改为迭代版本的。
因此,整个计算数据流变成了\(\{ r(x,\ t)\ \&\ Vext(x,\ t)\}\ \Rightarrow \ V(x,\ t\ + \ 1)\ \Rightarrow \ r(x,\ t\ + \ 1)\ \Rightarrow \ ...\)。通过这一离散化过程,平面连续吸引子模型可在数字电路上通过迭代实现。
为了更好地理解将CANN拓扑结构映射到多核NN架构上的过程,我们将差分方程公式(3)的每个迭代分解为以下5个步骤:
循环输入:
膜电位:
\[V(x,t + 1) = V_{1}(x,t + 1) + V_{ext}(x,t)\]电位平方:
\[V^{2}(x,t + 1) = V(x,t + 1) \cdot V(x,t + 1)\]抑制因子:
\[s_{inh}(t + 1) = \frac{1}{k\sum_{x^{'}}^{}{V^{2}\left( x^{'},t + 1 \right)}}\]发放率:
\[r(x,t + 1) = V^{2}(x,t + 1) \cdot s_{inh}(t + 1)\]